
In questo articolo vi propongo un tutorial di PixInsight che trovate anche sul mio canale YouTube: utilizzare il processo DrizzleIntegration per recuperare immagini sottocampionate.
Il processo di drizzling, o meglio l’implementazione dell’algoritmo di drizzle come spiegato nel dettaglio in questo articolo dello Space Telescope Science Institute, consiste nel recuperare da un set di dati sottocampionato e ben ditherato, dettagli che altrimenti sarebbero andati persi.
Sembra quasi magia a leggere queste parole, ma in realtà il metodo usato è relativamente semplice, ma altrettanto geniale. 🙂
In pratica i pixel delle immagini del set di dati in input viene rimappato su una immagine di output tenendo in considerazione il movimento e la rotazione dei singoli pixel presenti in ciascuna immagine e ricalcolando il pixel di output dell’immagine generata. Ecco perché è fondamentale che i dati di input siano stati acquisiti usando un dithering molto aggressivo!

Quando deve essere utilizzato DrizzleIntegration in PixInsight?
L’applicazione del processo DrizzleIntegration è opportuno farla solo nel caso in cui si abbiano dei dati che rispettino tutti i seguenti criteri:
- L’immagine deve essere sottocampionata. Ad esempio se state utilizzando una camera con pixel pitch di 3.8um e una focale inferiore ai 400mm sarete sicuramente eligibili per l’applicazione del drizzle.
- Il set di dati deve essere ditherato a dovere. Il dithering è fondamentale perché l’algoritmo funzioni bene, perché avendo un movimento ed una rotazione sostanziale dei pixel, questa permetterà di ricostruire meglio il dettaglio perso in fase di acquisizione.
- Il set di dati deve essere abbondante, nel senso che dovete avere almeno una trentina di frame a disposizione, ma più ne avete e meglio è. Con i sensori CMOS che sfruttano le pose brevi vi consiglio di stare sopra alle 50-60 pose almeno. 🙂
Come applicare il processo DrizzleIntegration in PixInsight?
In questo video trovate tutto il procedimento passo dopo passo.
Tuttavia qui di seguito vi riporto i passaggi chiave del procedimento. 🙂
Tempo richiesto: 1 ora
Come utilizzare DrizzleIntegration in PixInsight
-
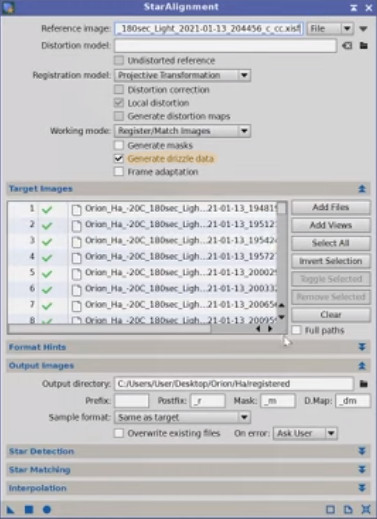
Generate i dati drizzle con StarAlignment.
In fase di registrazione delle immagini selezionare l’opzione Generate Drizzle Data, in modo tale da fare generare a PixInsight le informazioni relative a rotazione e shift dei pixel rispetto all’immagine di riferimento scelta.

-
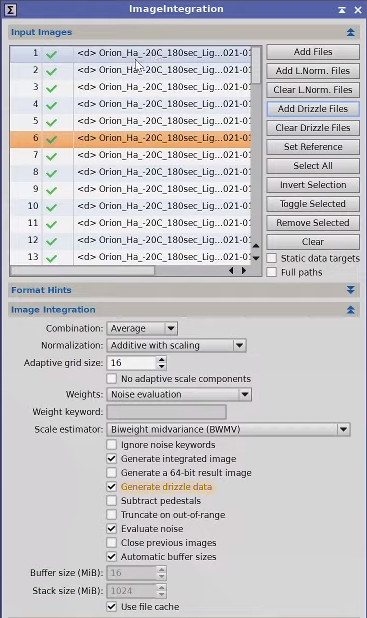
Aggiungete i dati drizzle nel processo ImageIntegration.
In fase di somma è fondamentale aggiungere i file di drizzle generati precedentemente alla lista dei file da sommare. Ciascun file d’immagine avrà il suo drizzle corrispondente. Verificare che PixInsight selezioni Generate drizzle data che normalmente seleziona in automatico.

-
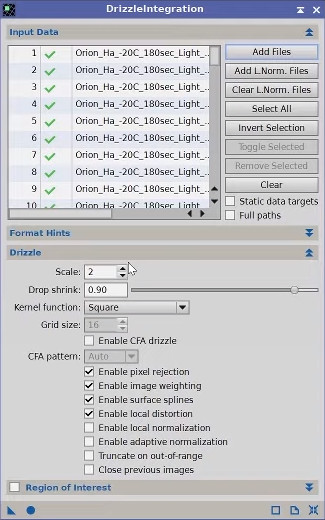
Integrate i dati con DrizzleIntegration.
Dopo aver sommato le immagini ed aver ottenuto la somma e aver popolato i dati drizzle con ulteriori informazioni, potete aprire il processo DrizzleIntegration.
Nel campo Input Data mettete i file drizzle, se usate una camera a colori ricordatevi di selezionare Enable CFA drizzle. Questo passaggio è importante perché farà sì che PixInsight effettui tale processo prima della debayerizzazione. I restanti parametri sono spiegati nel dettaglio nel video. 🙂
Prendete una bella tisana o un bicchiere della vostra bevanda preferita e aspettate poiché il processo richiede tempo, quindi rilassatevi e godetevi l’attesa nel frattempo. 😀
Perché se il drizzle è così potente non va utilizzato sempre?
Come tutte le cose anche il drizzle ha i suoi lati negativi. Infatti seppur sia vero che recupera molti dettagli, aumenta anche il rumore a larga frequenza dell’immagine, in particolar modo quello presente nei primi 2 wavelet d’immagine. Tuttavia se si ha un SNR alto la cosa non crea troppi problemi, ecco perché consiglio di avere quante più pose possibili!
Inoltre se la vostra immagine è già campionata correttamente non vi farà guadagnare nulla, perderete solo un sacco di tempo e il tempo è un bene prezioso. 🙂
Conclusione
Il drizzle è un processo miracoloso in alcune circostanze! Come potete notare nell’immagine di copertina di questo articolo, la mia elaborazione del complesso di Orione con ASI 1600 e Samyang 135mm sarebbe stata molto diversa da quella ottenuta.
E’ un processo però che va usato solo quando i canoni del sottocampionamento, dithering e quantità di dati vengono assolti, altrimenti sarà solo una perdita di tempo. 🙂
Ci “leggiamo” nel prossimo articolo e vi auguro come sempre cieli sereni!
6 risposte su “PixInsight: utilizzare il processo DrizzleIntegration”
Come al solito grande spiegazione! Volevo anche porre una domanda: ha senso anche l’applicazione della LocalNormalization? E se si in cosa migliora eventualmente il processo? Magari ti ho dato uno spunto per le prossime puntate della guida guida di pixinsight ☺️
Ciao Enrico e grazie! 🙂
La LocalNormalization è un processo che si utilizza per migliorare il valore del fondo cielo in una somma di immagini. In sostanza si prende una immagine di riferimento e si cerca di normalizzare il fondo cielo degli altri scatti.
Un tutorial è in programma, spero di realizzarlo a breve! 🙂
Stranamente nel mio PI, ultima release, non è possibile usare Image Integration per integrare i file drizzle. Anzi se tenti di aprire un file drizzle dice che non è supportato (!). Invece lPI li vede utilizzando il tool Drizzle Integration che è a parte e non in Image Integration.
Ciao Massimo, è sempre stato così. In ImageIntegration devi aggiungere i file drizzle oltre a quelli da sommare affinché si popolino i dati di drizzling che, successivamente, utilizzerai nel processo DrizzleIntegration 😉
Ciao Marco , una volta creati i file registrati piu’ i drizzle data con star allignment se voglio utilizzare NSG2.0 devo inserire solo i file registrati (in nsg2.0 c’e’ una casella drizzle data ma e’ disabilitata) e poi in image integration i file nsg piu’ i drizzle data generati da star allignment? e’ cosi’ o c’e’ altro da fare?
Ciao Davide!
No devi usare i file drizzle anche in NSG, ma tale feature è disponibile solo se acquisti la licenza completa del plugin. 🙂